A new robotic gripping device offers high degrees of strength, gentleness, and dexterity, researchers report.
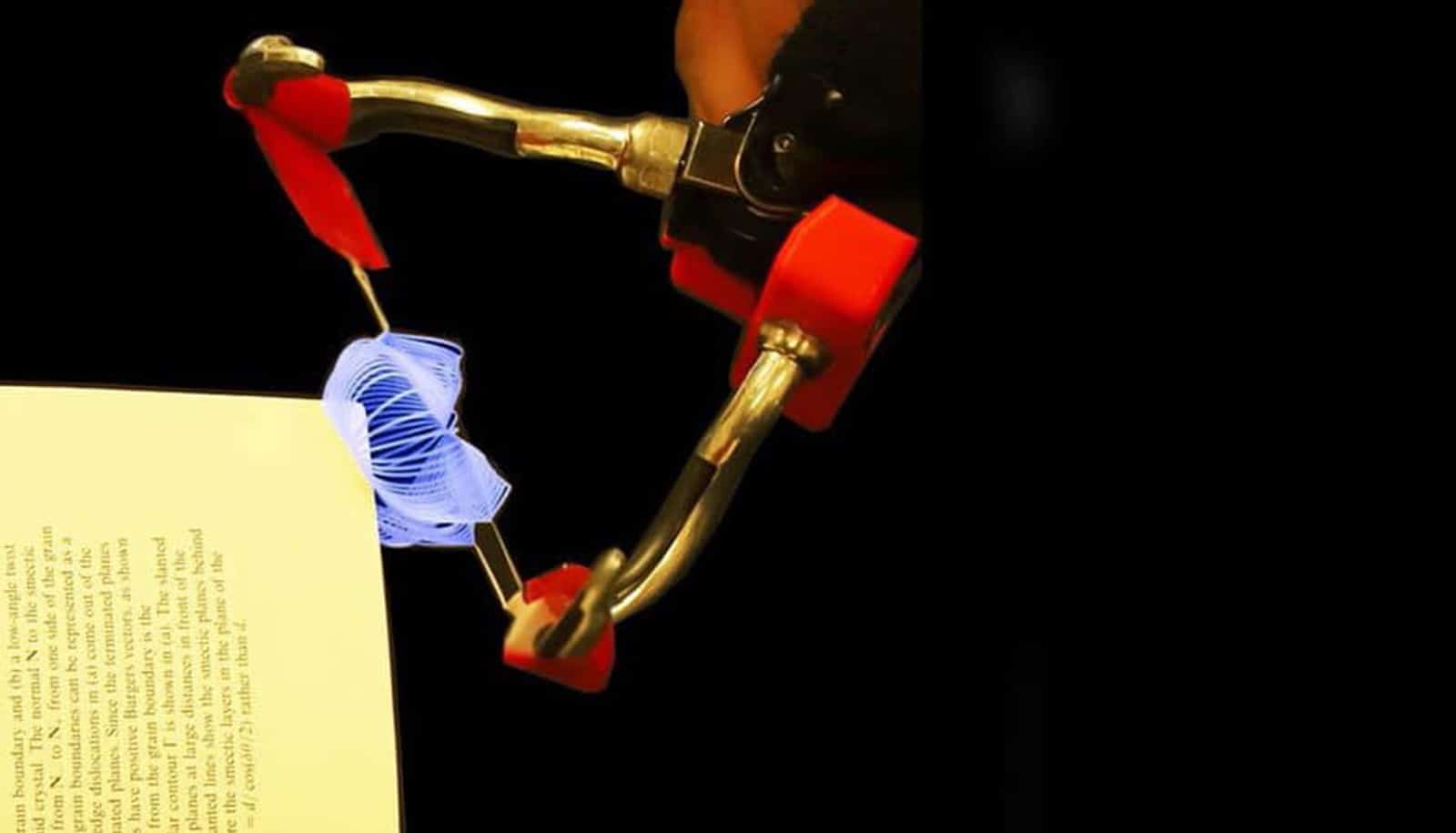
The gripper is gentle enough to pick up a drop of water, strong enough to pick up a 14.1 pound weight, dexterous enough to fold a cloth, and precise enough to pick up microfilms that are 20 times thinner than a human hair.
In addition to possible manufacturing applications, the researchers also integrated the device with technology that allows the gripper to be controlled by the electrical signals produced by muscles in the forearm, demonstrating its potential for use with robotic prosthetics.
“It is difficult to develop a single, soft gripper that is capable of handling ultrasoft, ultrathin, and heavy objects, due to tradeoffs between strength, precision, and gentleness,” says Jie Yin, associate professor of mechanical and aerospace engineering at North Carolina State University and corresponding author of the study in Nature Communications. “Our design achieves an excellent balance of these characteristics.”
The design for the new grippers builds on an earlier generation of flexible, robotic grippers that drew on the art of kirigami, which involves both cutting and folding two-dimensional sheets of material to form three-dimensional shapes.
“Our new grippers also use kirigami, but are substantially different, as we learned a great deal from the previous design,” says coauthor Yaoye Hong, a recent PhD graduate from NC State. “We’ve been able to improve the fundamental structure itself, as well as the trajectory of the grippers—meaning the path at which the grippers approach an object when grabbing it.”
The new design is able to achieve high degrees of strength and gentleness because of how it distributes force throughout the structure of the gripper.
“The strength of robotic grippers is generally measured in payload-to-weight ratio,” Yin says. “Our grippers weigh 0.4 grams and can lift up to 6.4 kilograms. That’s a payload-to-weight ratio of about 16,000. That is 2.5 times higher than the previous record for payload-to-weight ratio, which was 6,400. Combined with its characteristics of gentleness and precision, the strength of the grippers suggests a wide variety of applications.”
Another benefit of the new technology is that its attractive characteristics are driven primarily by its structural design, rather than by the materials used to fabricate the grippers.
“In practical terms, this means that you could fabricate the grippers out of biodegradable materials, such as sturdy plant leaves,” says Hong. “That could be particularly useful for applications where you would only want to use the grippers for a limited period of time, such as when handling food or biomedical materials. For example, we’ve demonstrated that the grippers can be used to handle sharp medical waste, such as needles.”
The researchers also integrated the gripping device with a myoelectric prosthetic hand, meaning the prosthesis is controlled using muscle activity.
“This gripper provided enhanced function for tasks that are difficult to perform using existing prosthetic devices, such as zipping certain types of zippers, picking up a coin, and so on,” says coauthor Helen Huang, professor in the joint biomedical engineering department at NC State and the University of North Carolina at Chapel Hill.
“The new gripper can’t replace all of the functions of existing prosthetic hands, but it could be used to supplement those other functions,” Huang says. “And one of the advantages of the kirigami grippers is that you would not need to replace or augment the existing motors used in robotic prosthetics. You could simply make use of the existing motor when utilizing the grippers.”
In proof-of-concept testing, the researchers demonstrated that the kirigami grippers could be used in conjunction with the myoelectric prosthesis to turn the pages of a book and pluck grapes off a vine.
“We think the gripper design has potential applications in fields ranging from robotic prosthetics and food processing to pharmaceutical and electronics manufacturing,” Yin says. “We are looking forward to working with industry partners to find ways to put the technology to use.”
The National Science Foundation supported the work.
Source: NC State


