Mechanical engineers have developed a unique way to use an ancient Japanese art form for a very 21st-century purpose.
Douglas Holmes, an associate professor of mechanical engineering at the Boston University College of Engineering, studies how materials change shape when they are bent or warped by external forces.
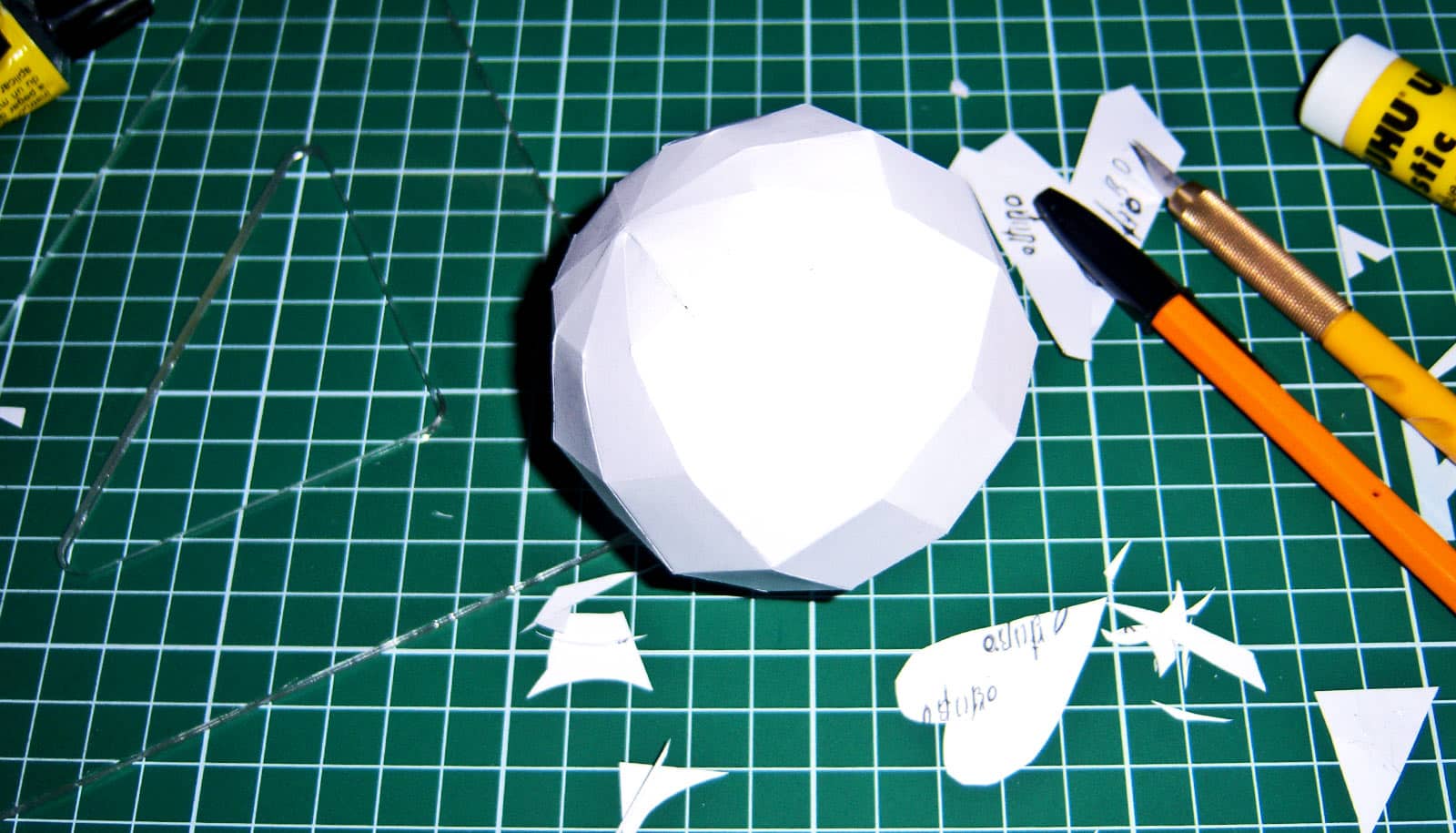
In a paper published this week in Science Robotics, Holmes and PhD student Yi Yang demonstrate how kirigami, the traditional Japanese art of paper cutting (cousin of origami paper-folding art), inspired them to design soft robotic grippers.
By cutting sheets of plastic in specific shapes, and then bending them in a specific way, the plastic morphs into a gripper that can safely and securely pick up objects of various size, weight, shape, and fragility.
Using the kirigami technique, they’ve developed grippers so small they can pick up a single grain of sand, and large enough to pick up a bottle of water.
Holmes and Yang hope that this research will make a significant contribution to the emerging field of soft robotics.
Source: Boston University